Inverse Kinematic Arm | TGM Prototype
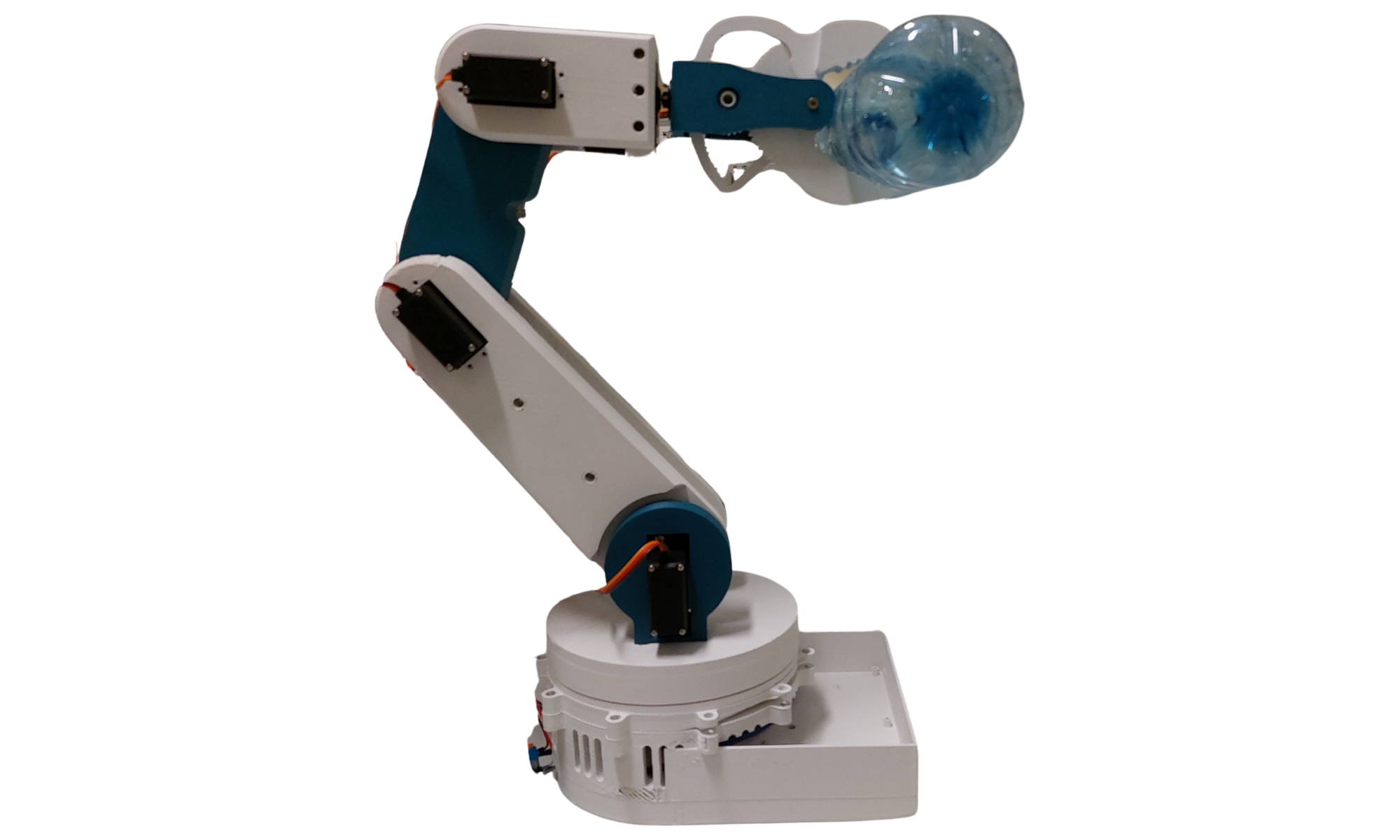
Project Overview During my studies at TGM, I developed a 3-axis robotic arm prototype to explore the implementation of Inverse Kinematics (IK) in embedded systems. The goal was to create a system where a user could interact with a modern web interface to define a target position, which the robot would then reach autonomously by calculating the required joint angles in real-time. Realization The project followed a full-stack approach, covering mechanical design, electronic integration, and software development. ...