Project Overview
The goal of this diploma thesis was to design and implement a motor-controlled XY positioning system for the measurement of an ionizing radiation field.
The project partner SL required a setup capable of moving a field strength measurement probe precisely across a two-dimensional grid.
A mechanical XY linear guide with stepper motors was provided by the partner — the focus of the project was the development of a complete electronic control system and a software interface to enable command-based operation.
Realization
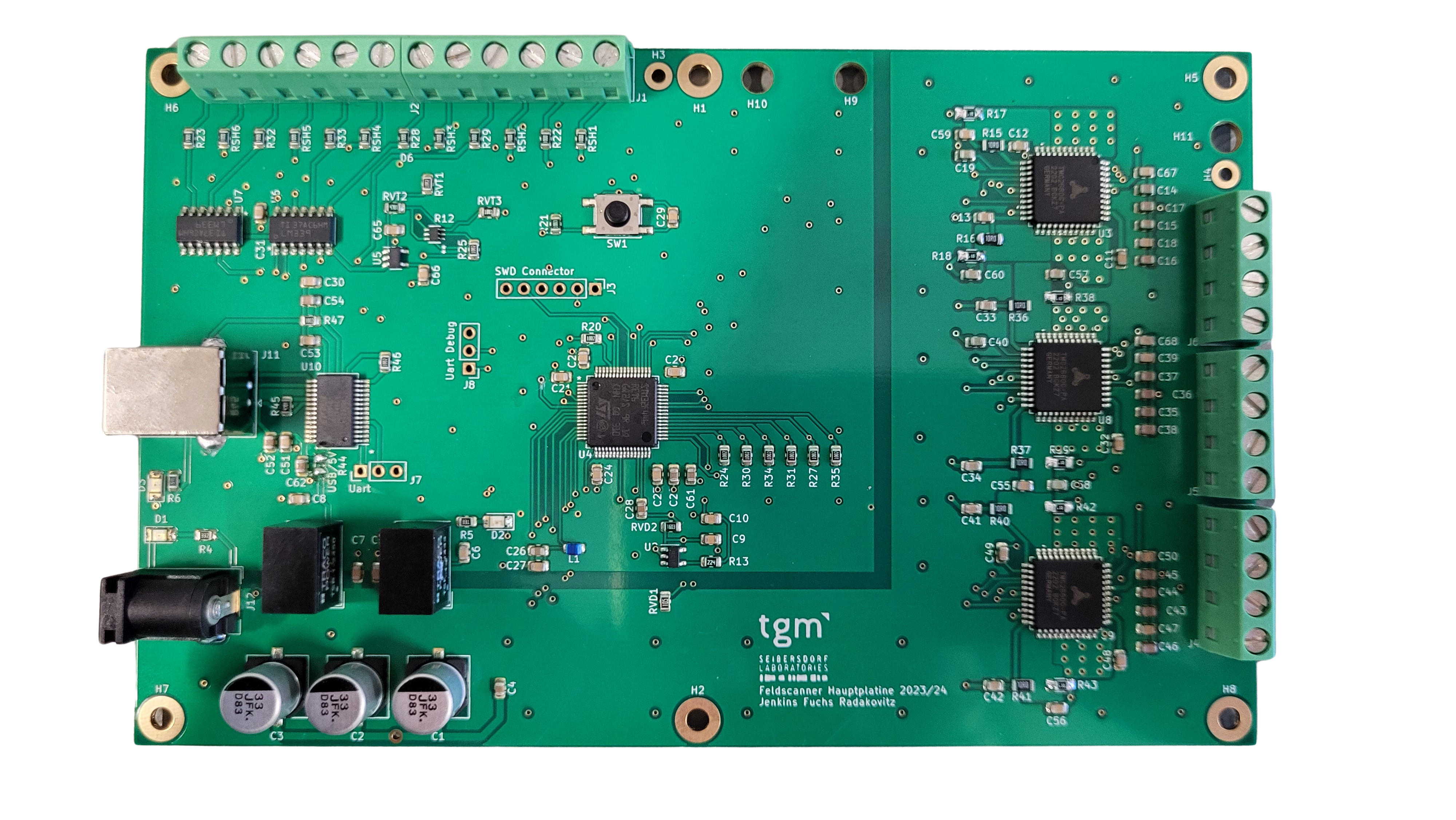
The entire electronic system was integrated on a single custom PCB.
Core functional blocks such as motor control, limit switch detection via comparators, and communication with the host system were designed, implemented, and thoroughly validated before system integration.
The motor behavior was analyzed for various operating parameters and load conditions to ensure smooth, accurate, and efficient movement across the full grid.
The control firmware, written in C/C++, ran on an STM32 microcontroller, enabling precise stepper motor control and real-time command processing via a command-line interface.
Results
The final system successfully met all functional requirements of the cooperation partner.
It allows for two-dimensional positioning of the measurement device with a positional accuracy of ±1 mm.
Additional safety and calibration features were implemented to further enhance system reliability and accuracy.
Communication with the controller is established via a defined command protocol, ensuring reproducibility and easy integration into measurement workflows.
Automated Light-Intensity Measurement
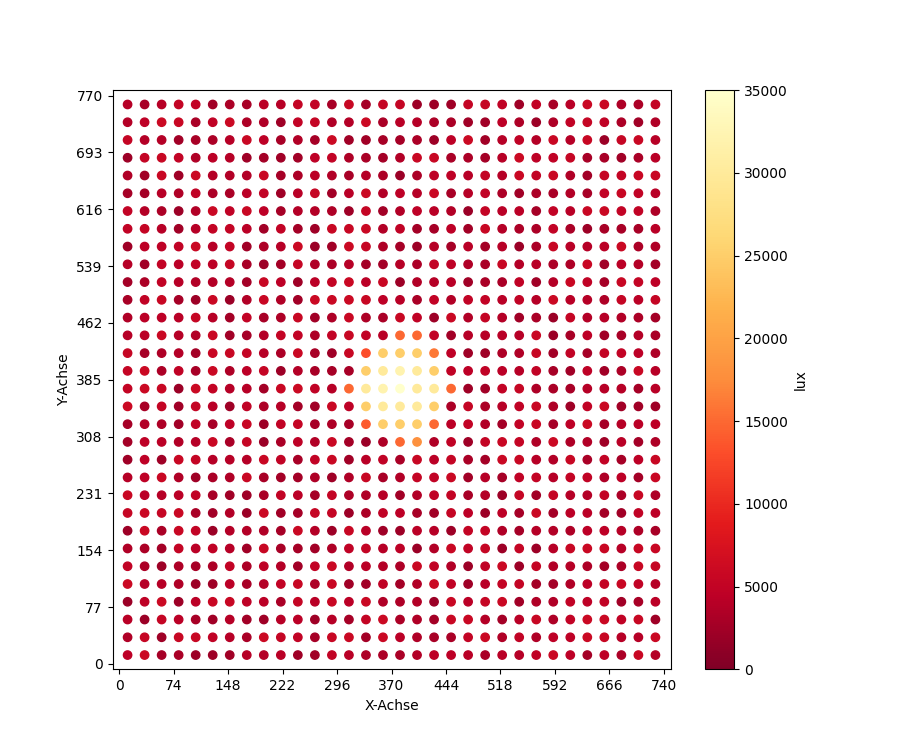
To validate the performance of the developed system, laboratory measurements of light intensity were automated using a Python-based test environment.
The program controlled the measurement sequence, collected data in real time, and visualized the results in a scatter plot, enabling clear analysis of the intensity distribution and system response under varying conditions.
Technical Highlights
| Component | Description |
|---|---|
| Controller | STM32 microcontroller (ARM Cortex-M) |
| Programming Language | C / C++ |
| Motor Drivers | Stepper driver circuits integrated on PCB |
| Gate Logic | Comparator-based limit detection |
| Interface | UART-based command-line control |
| Accuracy | ±1 mm positioning tolerance |
Skills & Competencies Gained
This project provided a complete hands-on engineering experience, from concept to validation, and helped me strengthen the following core skills:
- Embedded Systems Development: Low-level C/C++ firmware programming on STM32
- PCB Design & Hardware Integration: Designing and assembling a mainboard integrating multiple subsystems
- Motor Control Algorithms: Implementing and tuning stepper motor control (open-loop precision control)
- System Testing & Parameter Optimization: Evaluating dynamic performance under varying mechanical and electrical conditions
- Interdisciplinary Problem Solving: Bridging mechanical, electrical, and software design for a unified system solution
- Collaboration & Technical Communication: Working directly with an industrial project partner and documenting results according to professional engineering standards
Reflection
The Field Scanner project was more than a technical task — it was a complete engineering journey.
It taught me how to transform theoretical knowledge into a tangible, precise, and reliable system, combining electronics, programming, and system design with professional discipline and creativity.